



4. Funciones principales del software BMS
l Función de medición
(1) Medición de información básica: Monitoreo del voltaje, la señal de corriente y la temperatura de la batería. La función principal del sistema de gestión de baterías es medir el voltaje, la corriente y la temperatura de las celdas, lo cual constituye la base de todos los cálculos de alto nivel y la lógica de control del sistema.
(2) Detección de resistencia de aislamiento: el sistema de gestión de batería debe probar todo el sistema de batería y el sistema de alto voltaje para verificar su aislamiento.
(3) Detección de enclavamiento de alta tensión (HVIL): Se utiliza para confirmar la integridad de todo el sistema de alta tensión. Cuando la integridad del circuito del sistema de alta tensión se ve dañada, se activan las medidas de seguridad.
yoFunción de estimación
(1) Estimación de SOC y SOH: la parte central y más difícil
(2) Equilibrio: ajustar el desequilibrio SOC x capacidad entre monómeros a través de un circuito de equilibrio.
(3) Limitación de energía de la batería: la potencia de entrada y salida de la batería están limitadas a diferentes temperaturas de SOC.
yoOtras funciones
(1) Control de relé: incluye principal +, principal-, relé de carga +, relé de carga -, relé de precarga
(2) Control térmico
(3) Función de comunicación
(4) Diagnóstico de fallas y alarma
(5) Operación tolerante a fallos
5.Funciones principales del software de BMS
yoFunción de medición
(1) Medición de información básica: Monitoreo del voltaje, la señal de corriente y la temperatura de la batería. La función principal del sistema de gestión de baterías es medir el voltaje, la corriente y la temperatura de las celdas, lo cual constituye la base de todos los cálculos de alto nivel y la lógica de control del sistema.
(2) Detección de resistencia de aislamiento: el sistema de gestión de batería debe probar todo el sistema de batería y el sistema de alto voltaje para verificar su aislamiento.
(3) Detección de enclavamiento de alta tensión (HVIL): Se utiliza para confirmar la integridad de todo el sistema de alta tensión. Cuando la integridad del circuito del sistema de alta tensión se ve dañada, se activan las medidas de seguridad.
yoFunción de estimación
(1) Estimación de SOC y SOH: la parte central y más difícil
(2) Equilibrio: ajustar el desequilibrio SOC x capacidad entre monómeros a través de un circuito de equilibrio.
(3) Limitación de energía de la batería: la potencia de entrada y salida de la batería están limitadas a diferentes temperaturas de SOC.
yoOtras funciones
(1) Control de relé: incluye principal +, principal-, relé de carga +, relé de carga -, relé de precarga
(2) Control térmico
(3) Función de comunicación
(4) Diagnóstico de fallas y alarma
(5) Operación tolerante a fallos
6.Arquitectura del software BMS
yoGestión de alta y baja tensión
Cuando está encendido, el BMS se activa mediante la VCU mediante una señal de línea fija o CAN de 12 V. Tras completar la autocomprobación y entrar en modo de espera, la VCU envía un comando de alto voltaje y el BMS controla el cierre del relé para completar la conexión de alto voltaje. Cuando está apagado, la VCU envía un comando de bajo voltaje y desconecta la activación de 12 V. Cuando la pistola se inserta para cargar estando apagada, puede activarse mediante la señal CP o A+.
yoGestión de carga
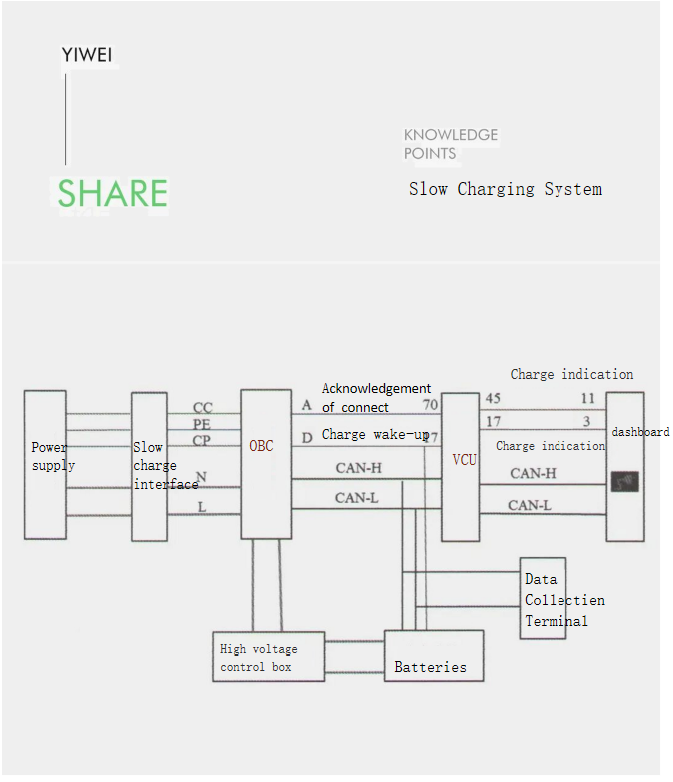
(1) Carga lenta
La carga lenta consiste en cargar la batería con corriente continua (CC) convertida a partir de corriente alterna mediante el cargador integrado de la pila de carga (o fuente de alimentación de 220 V). Las especificaciones de la pila de carga suelen ser de 16 A, 32 A y 64 A, y también se puede cargar a través de una fuente de alimentación doméstica. El BMS puede reactivarse mediante la señal CC o CP, pero debe asegurarse de que pueda entrar en modo de suspensión normal una vez finalizada la carga. El proceso de carga de CA es relativamente sencillo y puede desarrollarse de acuerdo con las normas nacionales detalladas.
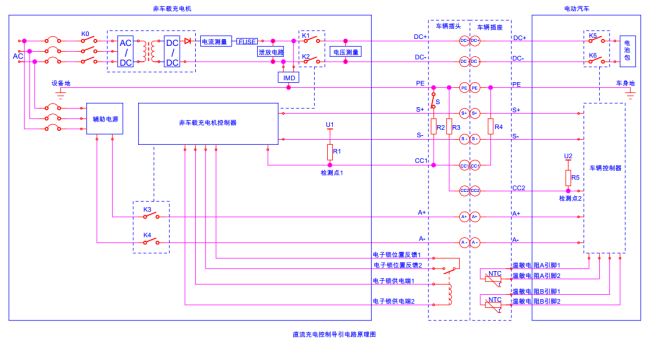
(2) Carga rápida
La carga rápida consiste en cargar la batería con corriente continua mediante la pila de carga de CC, lo que permite alcanzar una velocidad de carga de 1 C o superior. Generalmente, el 80 % de la batería se carga en 45 minutos. Se activa mediante la señal A+ de la fuente de alimentación auxiliar de la pila de carga.
yoFunción de estimación
(1) El SOP (Estado de Potencia) obtiene principalmente la potencia de carga y descarga disponible de la batería consultando tablas de temperatura y SOC. La VCU determina el uso del vehículo en su conjunto según el valor de potencia enviado.
(2) El SOH (estado de salud) caracteriza principalmente el estado de salud actual de la batería, con un valor entre 0 y 100 %. Generalmente, se considera que la batería no se puede utilizar cuando su estado es inferior al 80 %.
(3) El SOC (estado de carga) es el algoritmo de control principal del BMS, que caracteriza el estado de capacidad restante. Se basa principalmente en el método integral de amperios-hora y el algoritmo EKF (filtro de Kalman extendido), combinado con estrategias de corrección (como la corrección de voltaje de circuito abierto, la corrección de carga completa, la corrección de fin de carga, la corrección de capacidad a diferentes temperaturas y SOH, etc.).
(4) El algoritmo SOE (Estado de Energía) no está ampliamente desarrollado por los fabricantes nacionales o utiliza algoritmos relativamente simples para obtener la relación entre la energía restante en el estado actual y la energía máxima disponible. Esta función se utiliza principalmente para estimar la autonomía de crucero restante.
yoDiagnóstico de fallas
Se distinguen diferentes niveles de fallo según el rendimiento de la batería, y el BMS y la VCU toman diferentes medidas de procesamiento según el nivel de fallo, como advertencias, limitación de potencia o desconexión directa de alta tensión. Los fallos incluyen fallos de adquisición de datos y racionalidad, fallos eléctricos (sensores y actuadores), fallos de comunicación y fallos de estado de la batería, entre otros.
1.Funciones principales del software de BMS
yoFunción de medición
(1) Medición de información básica: Monitoreo del voltaje, la señal de corriente y la temperatura de la batería. La función principal del sistema de gestión de baterías es medir el voltaje, la corriente y la temperatura de las celdas, lo cual constituye la base de todos los cálculos de alto nivel y la lógica de control del sistema.
(2) Detección de resistencia de aislamiento: el sistema de gestión de batería debe probar todo el sistema de batería y el sistema de alto voltaje para verificar su aislamiento.
(3) Detección de enclavamiento de alta tensión (HVIL): Se utiliza para confirmar la integridad de todo el sistema de alta tensión. Cuando la integridad del circuito del sistema de alta tensión se ve dañada, se activan las medidas de seguridad.
yoFunción de estimación
(1) Estimación de SOC y SOH: la parte central y más difícil
(2) Equilibrio: ajustar el desequilibrio SOC x capacidad entre monómeros a través de un circuito de equilibrio.
(3) Limitación de energía de la batería: la potencia de entrada y salida de la batería están limitadas a diferentes temperaturas de SOC.
yoOtras funciones
(1) Control de relé: incluye principal +, principal-, relé de carga +, relé de carga -, relé de precarga
(2) Control térmico
(3) Función de comunicación
(4) Diagnóstico de fallas y alarma
(5) Operación tolerante a fallos
2.Arquitectura del software BMS
yoGestión de alta y baja tensión
Cuando está encendido, el BMS se activa mediante la VCU mediante una señal de línea fija o CAN de 12 V. Tras completar la autocomprobación y entrar en modo de espera, la VCU envía un comando de alto voltaje y el BMS controla el cierre del relé para completar la conexión de alto voltaje. Cuando está apagado, la VCU envía un comando de bajo voltaje y desconecta la activación de 12 V. Cuando la pistola se inserta para cargar estando apagada, puede activarse mediante la señal CP o A+.
yoGestión de carga
(1) Carga lenta
La carga lenta consiste en cargar la batería con corriente continua (CC) convertida a partir de corriente alterna mediante el cargador integrado de la pila de carga (o fuente de alimentación de 220 V). Las especificaciones de la pila de carga suelen ser de 16 A, 32 A y 64 A, y también se puede cargar a través de una fuente de alimentación doméstica. El BMS puede reactivarse mediante la señal CC o CP, pero debe asegurarse de que pueda entrar en modo de suspensión normal una vez finalizada la carga. El proceso de carga de CA es relativamente sencillo y puede desarrollarse de acuerdo con las normas nacionales detalladas.
(2) Carga rápida
La carga rápida consiste en cargar la batería con corriente continua mediante la pila de carga de CC, lo que permite alcanzar una velocidad de carga de 1 C o superior. Generalmente, el 80 % de la batería se carga en 45 minutos. Se activa mediante la señal A+ de la fuente de alimentación auxiliar de la pila de carga.
yoFunción de estimación
(1) El SOP (Estado de Potencia) obtiene principalmente la potencia de carga y descarga disponible de la batería consultando tablas de temperatura y SOC. La VCU determina el uso del vehículo en su conjunto según el valor de potencia enviado.
(2) El SOH (estado de salud) caracteriza principalmente el estado de salud actual de la batería, con un valor entre 0 y 100 %. Generalmente, se considera que la batería no se puede utilizar cuando su estado es inferior al 80 %.
(3) El SOC (estado de carga) es el algoritmo de control principal del BMS, que caracteriza el estado de capacidad restante. Se basa principalmente en el método integral de amperios-hora y el algoritmo EKF (filtro de Kalman extendido), combinado con estrategias de corrección (como la corrección de voltaje de circuito abierto, la corrección de carga completa, la corrección de fin de carga, la corrección de capacidad a diferentes temperaturas y SOH, etc.).
(4) El algoritmo SOE (Estado de Energía) no está ampliamente desarrollado por los fabricantes nacionales o utiliza algoritmos relativamente simples para obtener la relación entre la energía restante en el estado actual y la energía máxima disponible. Esta función se utiliza principalmente para estimar la autonomía de crucero restante.
yoDiagnóstico de fallas
Se distinguen diferentes niveles de fallo según el rendimiento de la batería, y el BMS y la VCU toman diferentes medidas de procesamiento según el nivel de fallo, como advertencias, limitación de potencia o desconexión directa de alta tensión. Los fallos incluyen fallos de adquisición de datos y racionalidad, fallos eléctricos (sensores y actuadores), fallos de comunicación y fallos de estado de la batería, entre otros.
Contáctenos:
yanjing@1vtruck.com +(86)13921093681
duanqianyun@1vtruck.com +(86)13060058315
liyan@1vtruck.com +(86)18200390258
Hora de publicación: 12 de mayo de 2023



